経済産業省 — 半導体・デジタル産業戦略の現状と今後(第13回) p.23
未踏修了生による、いちご自動受粉ロボット、電気味覚メディア、うなぎパイ植物工場、イグ・ノーベル賞受賞に関する事例紹介。
タグ: 未踏プログラム, ロボット工学, 食品技術, メディアアート, イグ・ノーベル賞
キーファクト
- 2024年: 2024年に春華堂のヘイチゴ植物工場へロボット導入 (食料安全保障)
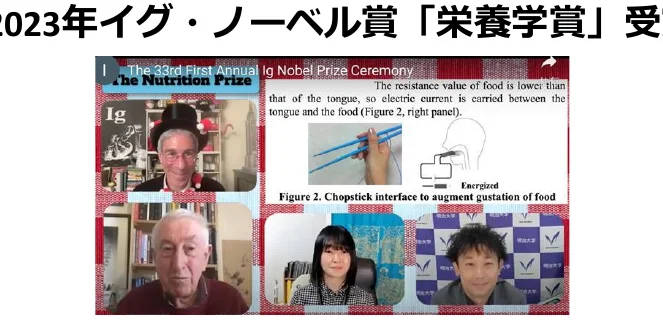
- 2023年: 中村裕美氏が2023年イグ・ノーベル賞「栄養学賞」を受賞 (other)
- 2020年: 市川友貴氏が2020年にHarvestXを創業 (スタートアップ)
このスライドの図表
- [figure] figure (conf=0.96)
- [screenshot] 2023年イグ・ノーベル賞「栄養学賞」受賞に関するオンラインイベントのスクリーンショット。画面には、複数の参加者のビデオ通話画面、栄養学賞に関する説明、および電気刺激を用いた味覚増強に関する図が含まれています。
抽出テキスト
未踏修了生の事例 虫媒に代わるいちごの自動受粉ロボットシステムの開発 市川 友貴 (2019年度未踏IT修了) 画像情報を用いて適切な受粉時期を判断し、ロボットに取り付けられた専用アタッチメントによる受粉作業を行う。 花検出アルゴリズム 授粉対象である花をRGBとDepth 情報から演算・検出を行う。 アームの軌道生成 生成された3次元座標から最適なロボットアームの軌道生成を行う。 授粉アタッチメント 専用の授粉アタッチメント。 花粉の媒介を行う。 2020年 HarvestXを創業。 2024年にうなぎパイ の有限会社「春華堂」ヘイチゴ植物工場導入 電気味覚を活用した新たな食物コンテンツの提案 中村 裕美 (2010年度未踏ユース修了) 電気刺激により感じられる電気味覚を応用し、新しい味覚メディアとして開拓する。 電気と合う 食べ物/飲み物 インタフェース 21世紀の調味料、 電気味覚の配信 電気味覚 再生中・・・ 飲食検知による 複合味覚提示 一緒に味わう 電気味覚 2023年イグ・ノーベル賞「栄養学賞」受賞 The 33rd Annual Ig Nobel Prize Ceremony The resistance value of food is lower than that of the tongue, so electric current is carried between the tongue and the food (Figure 2, right panel). Energized Figure 2. Chopstick interface to augment gustation of food
戻る
経産経済産業省2025年5月
半導体・デジタル産業戦略の現状と今後(第13回)p.23/140
23 / 140
ファクト
3件このスライドの図表
2件図
figure (conf=0.96)
スクリーンショット
2023年イグ・ノーベル賞「栄養学賞」受賞に関するオンラインイベントのスクリーンショット。画面には、複数の参加者のビデオ通話画面、栄養学賞に関する説明、および電気刺激を用いた味覚増強に関する図が含まれています。
イグ・ノーベル賞栄養学賞スクリーンショットオンラインイベント味覚増強