経済産業省 — 半導体・デジタル産業戦略の今後の方向性(第14回) p.10
ロボティクスAIは、ティーチングプレイバックからVLA/VLMへ進化し、学習・制御が高速化・汎用化。
タグ: ロボティクス, AI, フィジカルAI, ティーチングプレイバック, VLA, VLM, 模倣学習, 強化学習, デジタルツイン
キーファクト
- 従来のティーチングプレイバックの教示時間は数週間から数か月かかる (DX・デジタル)
- AI活用によるロボットの教示時間は数分間に短縮可能 (DX・デジタル)
このスライドの図表
- [figure] figure (conf=0.97)
図版(第三者権利のため非表示)
- ロボットを指導する作業員
- ティーチング作業を行う作業員
- フォークリフトの3Dモデリングと企業ロゴ
- フォークリフトの3Dモデル
抽出テキスト
ロボティクスにおけるAI(フィジカルAI)の開発 半導体・デジタル産業を取り巻く情勢 ● 従来のロボティクス(単一作業特化型ロボット)は、ティーチングプレイバック(人間がロボットに直接動作を覚えさせる制御手法)が主流。各動作にティーチングが必要なため、導入コストが高く、環境変化への柔軟性がない。 ● 近年は、VLA(Visual Language Action Model)、模倣学習、強化学習等の活用を通じて、実データとシミュレーションデータも含めた大量のデータをAIに学習させ、自律性や汎用性を高めたAIロボティクスの開発が加速。 従来の制御(ティーチングプレイバック) 近年のAIを活用した学習・制御(VLA・VLM) ● 従来のティーチングプレイバックは、定型作業に強く動作の精 度は高い。 ● ロボット基盤モデル(VLA/VLM)の進化で、従来の教示時間が大幅に短縮。 (数週間から数分間に短縮したとの見方も存在。) ● 一方、教示時間が数週間や場合によっては数か月/1ライン かかり、初期導入コストが高い。 ● 新たな部品・生産ラインに柔軟かつ高速に対応が可能に。 ● また、段取り替えが発生する場合、都度教示が必要で、環境 変化への柔軟性がない。 センサーデータをもとに物理空間上の実体を デジタルツインで再現 デジタルツイン上で生成された3Dモデリング (フォークリフト) 実機 デジタル空間で再現 (出所) 各種報道・レポートによる公表情報から引用 10
戻る
経産経済産業省2025年12月
半導体・デジタル産業戦略の今後の方向性(第14回)p.10/25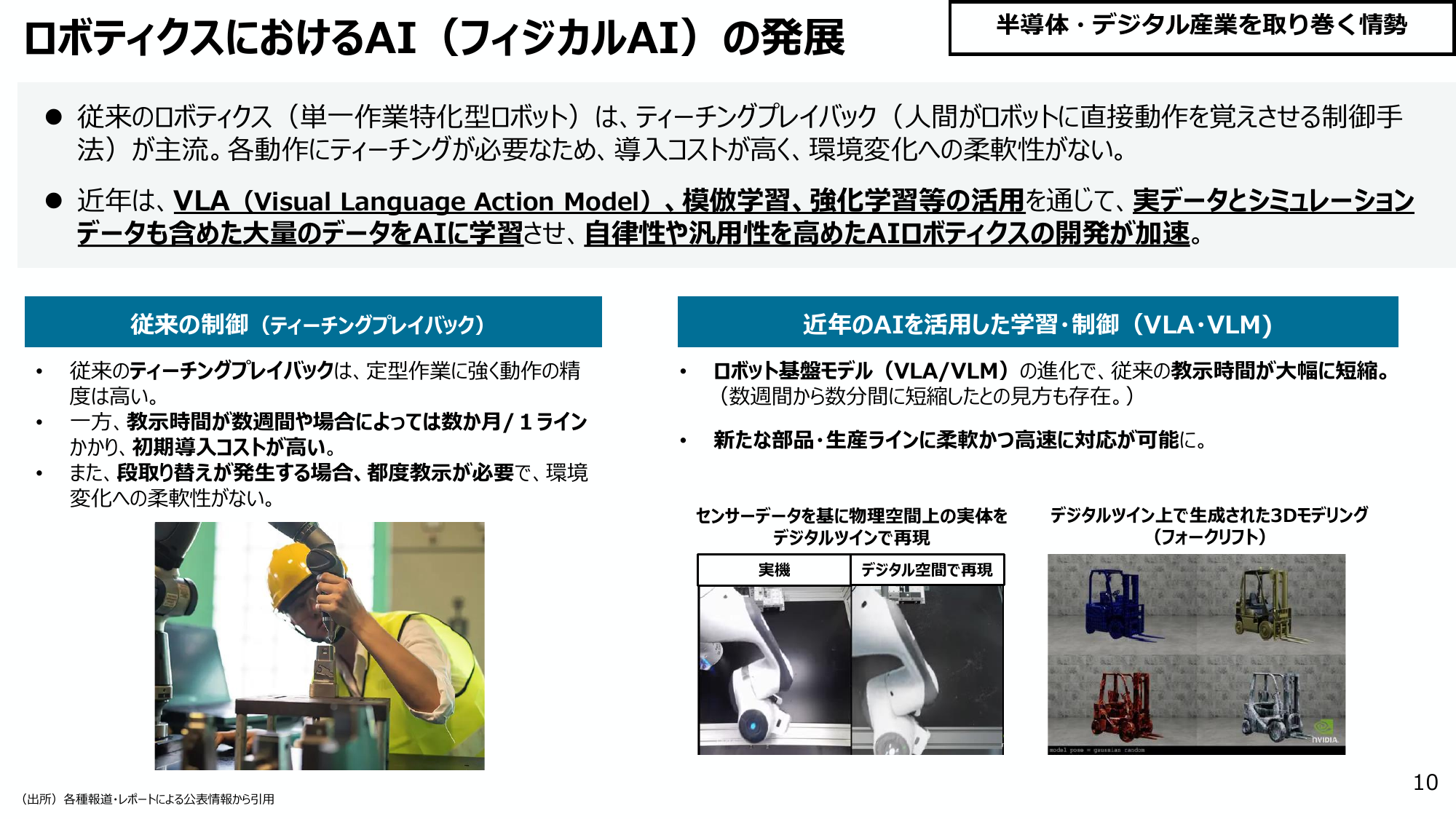
10 / 25
このスライドの図表
2件図

figure (conf=0.97)