ファクトはAIによる自動抽出です。誤りが含まれる可能性があります。正確な情報は原資料をご確認ください。
農林水産省
実績食料安全保障
概要
スマート農業技術の導入により、水稲栽培における除草作業の労働時間を80%削減することが実現されている。ドローンや自動走行農機などの活用が農業の省力化と担い手不足の解消に貢献している。
出典スライド
スライドテキスト
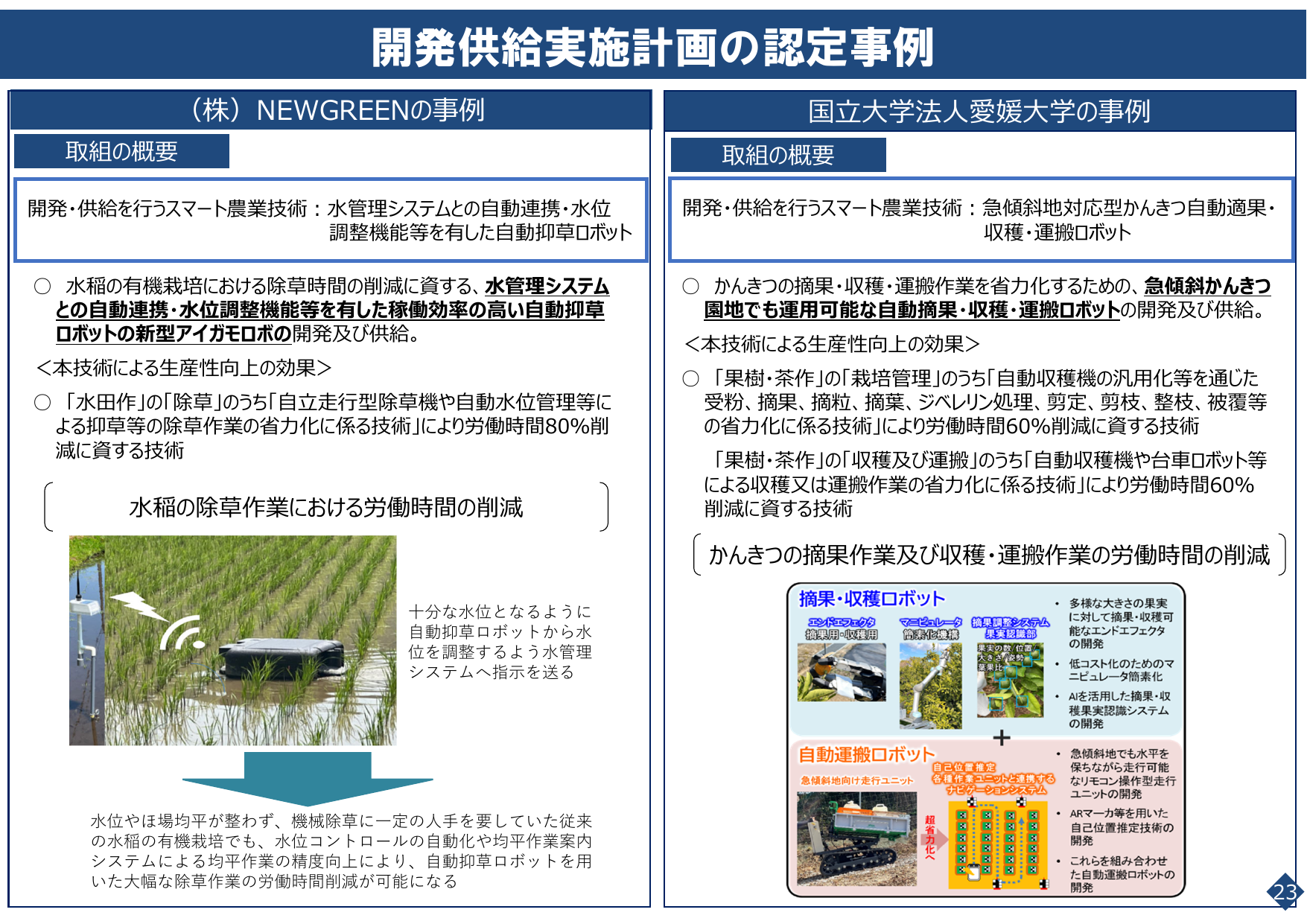
開発供給実施計画の認定事例 (株)NEWGREENの事例 国立大学法人愛媛大学の事例 取組の概要 取組の概要 開発・供給を行うスマート農業技術:水管理システムとの自動連携・水位 調整機能等を有する自動抑草ロボット 開発・供給を行うスマート農業技術:急傾斜地対応型かんきつ自動適果・ 収穫・運搬ロボット 水稲の有機栽培における除草時間の削減に資する、水管理システム との自動連携・水位調整機能等を有した稼働効率の高い自動抑草 ロボットの新型アイガモロボの開発及び供給。 かんきつ の摘果・収穫・運搬作業を省力化するための、急傾斜かんきつ 園地でも運用可能な自動摘果・収穫・運搬ロボットの開発及び供給。 <本技術による生産性向上の効果> <本技術による生産性向上の効果> 「水田作」の「除草」のうち「自立走行型除草機や自動水位管理等に よる抑草等の除草作業の省力化に係る技術」により労働時間80%削 減に資する技術 「果樹・茶作」の「栽培管理」のうち「自動収穫機の汎用化等を通じた 受粉、摘果、摘粒、摘葉、ジベレリン処理、剪定、剪枝、整枝、被覆等 の省力化に係る技術」により労働時間60%削減に資する技術 水稲の除草作業における労働時間の削減 「果樹・茶作」の「収穫及び運搬」のうち「自動収穫機や台車ロボット等 による収穫又は運搬作業の省力化に係る技術」により労働時間60% 削減に資する技術 かんきつの摘果作業及び収穫・運搬作業の労働時間の削減 十分な水位となるように 自動抑草ロボットから水 位を調整するよう水管理 システムへ指示を送る 摘果・収穫ロボット 多様な大きさの果実 に対して摘果・収穫可 能なエンドエフェクタ ーの開発 低コスト化のためのマ ニピュレータ簡素化 AIを活用した摘果・収 穫果実認識システム の開発 自動運搬ロボット 急傾斜地でも水平を 保ちながら走行可能 りリモコン操作型走行 ユニットの開発 ARマーカ等を用いた 自己位置推定技術の 開発 これらを組み合わせ た自動運搬ロボットの 開発 水位やほ場平均が整わず、機械除草に一定の人手を要していた従来 の水稲の有機栽培でも、水位コントロールの自動化や均平作業案 内 システムによる均平作業の精度向上により、自動抑草ロボットを用 いた大幅な除草作業の労働時間削減が可能になる